M.S. Candidate: Rojda Toraman
Program: Cognitive Science
Date: 22.01.2026 / 09:00
Place: A-212
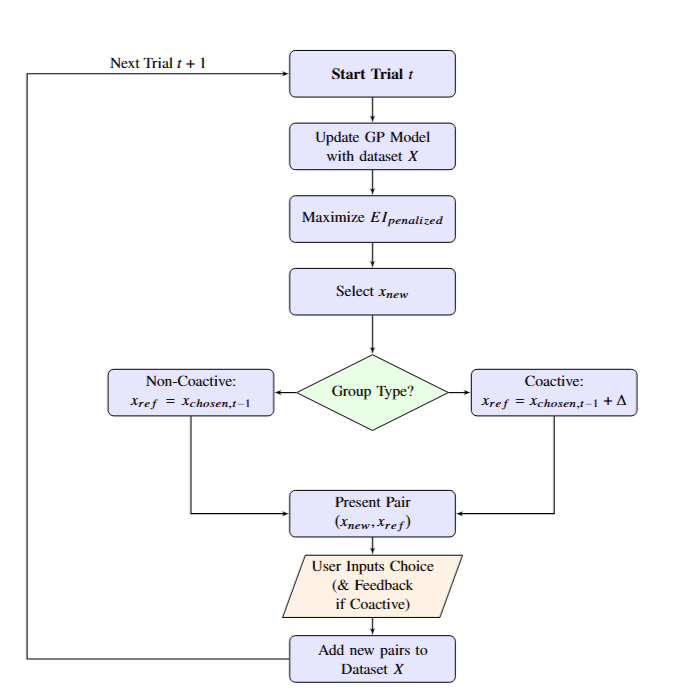
Abstract: Reproducing natural haptic sensations through artificial mechanical systems is a fundamental challenge in robotics. While haptic devices are controlled by precise numerical parameters, human perception of natural objects relies on subjective physical concepts that do not map directly to machine variables. Consequently, users cannot easily tune a device to match a target sensation by manually adjusting values. To solve this challenge, a Bayesian preference learning method is adopted to learn haptic parameters corresponding to real sensations based on human feedback. This approach utilizes pairwise comparisons, as humans make relative judgments with lower noise compared to absolute estimation. The human preference function is modeled using Gaussian Processes (GP), as this method is effective when the latent function's structure is unknown. An Active Learning framework is also adopted to intelligently select comparison pairs in order to speed up the model's convergence by maximizing information gain. The primary objective of this research is to evaluate the model's efficiency in converging to the true mechanical parameters of a reference sensation through pairwise comparisons. The study examines how the model's convergence changes as the number of variables increases, and evaluates whether coactive feedback speeds up the process. Overall, this study demonstrates that integrating human preferences into a Bayesian framework facilitates accurate replication of physical sensations while maintaining cognitively comfortable interactions.