Yüksek Lisans Adayı: Rojda Toraman
EABD: Bilişsel Bilimler
Tarih: 22.01.2026 / 09:00
Yer: A-212
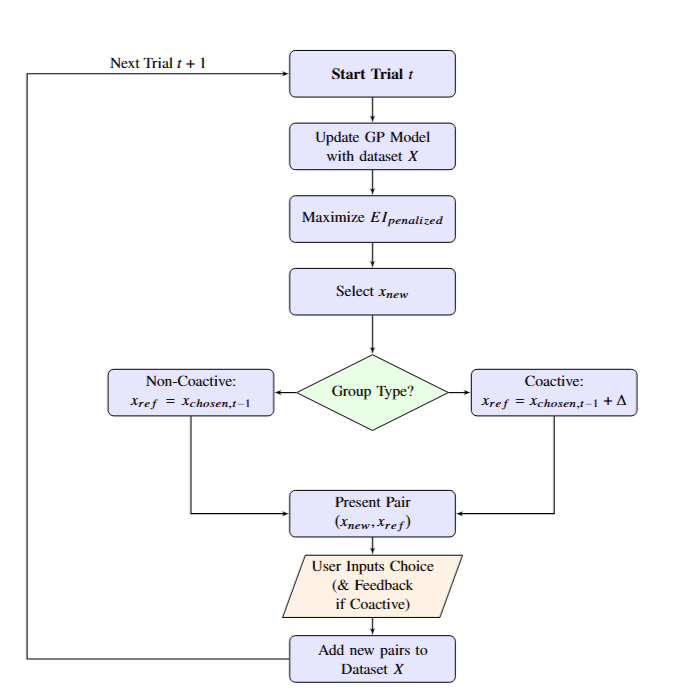
Özet: Yapay mekanik sistemler aracılığıyla doğal haptik duyumların yeniden üretilmesi robotikte temel bir zorluktur. Haptik cihazlar hassas sayısal parametrelerle kontrol edilirken, insanların doğal nesnelere dair algısı makine değişkenleriyle doğrudan örtüşmeyen öznel fiziksel kavramlara dayanır. Sonuç olarak kullanıcılar, değerleri manuel olarak değiştirerek bir cihazı hedeflenen duyumla eşleşecek şekilde kolayca ayarlayamazlar. Bu zorluğu çözmek için, gerçek duyumlara karşılık gelen haptik parametreleri insan geri bildirimine dayalı olarak öğrenmek amacıyla Bayesçi tercih öğrenme yöntemi benimsenmiştir. Bu yaklaşım, insanların mutlak tahminlere kıyasla daha düşük gürültü oranıyla göreli yargılarda bulunabilmesi nedeniyle ikili karşılaştırmaları kullanmaktadır. Altta yatan fonksiyon yapısının bilinmediği durumlarda etkili bir yöntem olması nedeniyle insanların tercih fonksiyonu Gauss Süreçleri kullanılarak modellenmiştir. Ayrıca, bilgi kazancını maksimize ederek modelin yakınsamasını hızlandırmak ve karşılaştırma çiftlerini akıllıca seçmek için bir Aktif Öğrenme çerçevesi kullanılmıştır. Bu araştırmanın temel amacı, modelin ikili karşılaştırmalar yoluyla referans bir duyumun gerçek mekanik parametrelerine yakınsama verimliliğini değerlendirmektir. Çalışma, değişken sayısı arttıkça modelin yakınsamasının nasıl değiştiğini incelemekte ve koaktif geri bildirimin süreci hızlandırıp hızlandırmadığını değerlendirmektedir. Sonuç olarak bu çalışma, insan tercihlerini Bayesçi bir çerçeveye entegre etmenin, bilişsel açıdan rahat etkileşimleri korurken fiziksel duyumların doğru bir şekilde yeniden üretilmesini kolaylaştırdığını göstermektedir.