Kerem Yıldız, Development of The MiRHub Database: Mapping TCGA Data on SNV Presence and Differential Expression in miRNA-mRNA Duplexes
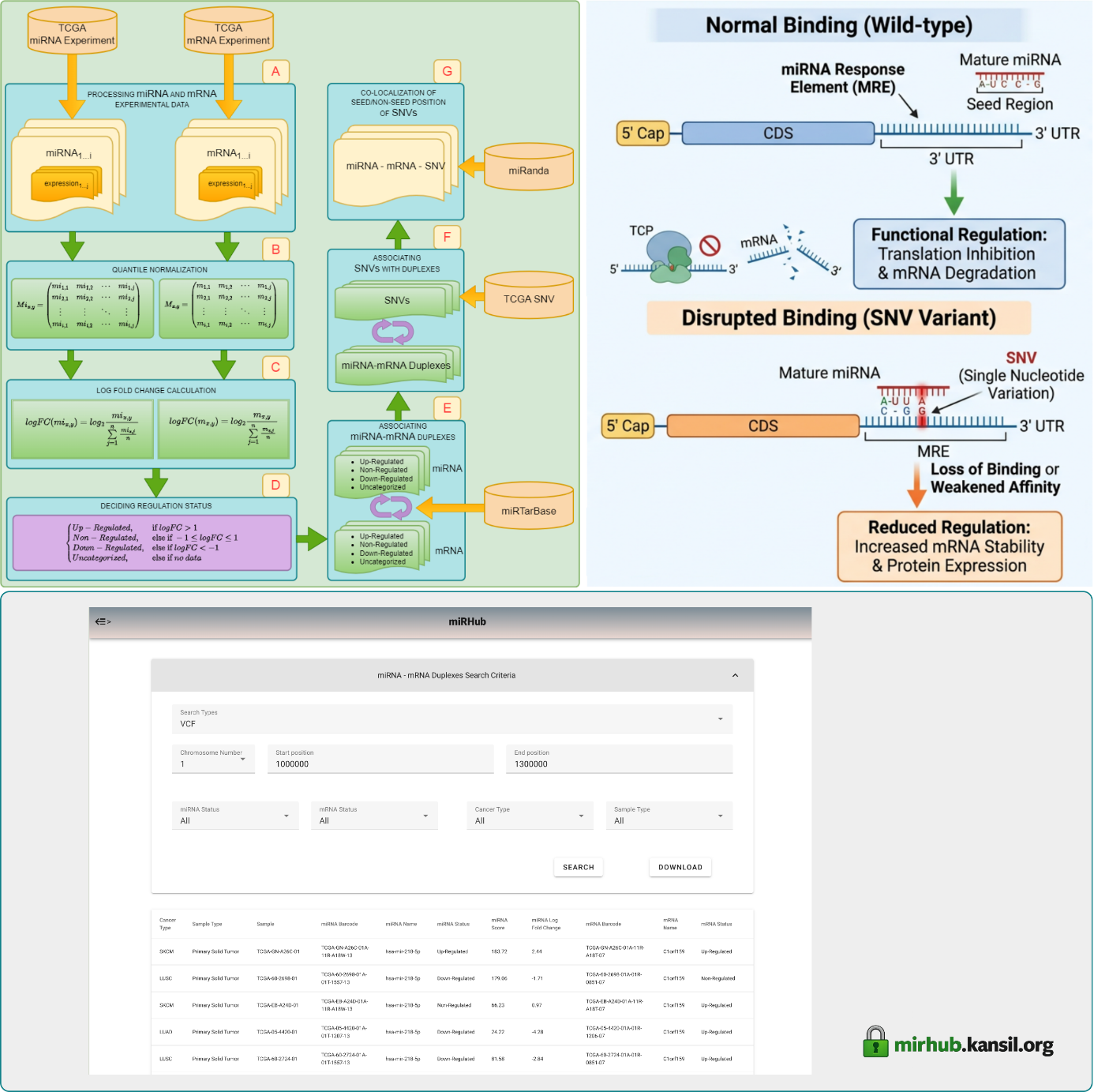
MicroRNAs (miRNAs) regulate gene expression post-transcriptionally through sequence-specific binding to target messenger RNAs (mRNAs). Single nucleotide variants (SNVs) can disrupt miRNA–mRNA interactions and contribute to human disease. We present miRHub, a comprehensive database that integrates miRNA–mRNA duplex information with 3′UTR SNV context using matched The Cancer Genome Atlas expression and genotyping data. The miRHub portal provides integrated views for mRNA expression, miRNA expression, and co-localizing SNVs with the corresponding miRNA–mRNA duplexes. As a use case, we report statistically significant differences in mRNA regulation between different sample types based on SNV-associated duplexes.
Date: 09.06.2026 / 13:00 Place: A-212